Students Will Langford and Sam Calisch of MIT’s Center for Bits and Atoms used the Shopbot Desktop as their weapon of choice in their robotics class last semester. The course, taught by Sangbae Kim (of electric cheetah fame) and Matt Haberland, pushed students to extract principles of animal locomotion and use them to build robots.
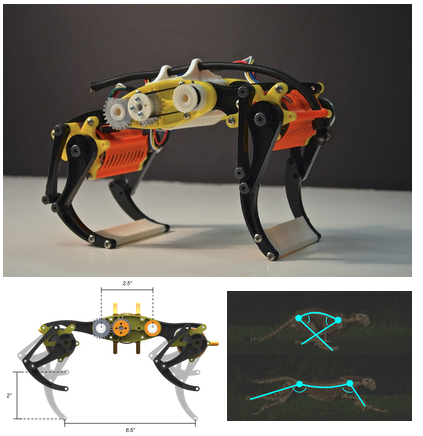
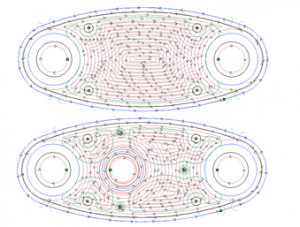
Ocelot, a bounding quadruped, uses three DC motors to run at speeds over 1.5 body lengths per second. The goal of the project was to show that this performance is possible with extremely low cost and complexity. To this end, the timing belt pulleys, motor cases, and feet were printed on a Makerbot Replicator II 3D Printer and the gears were cut from ¼” Aluminum 6061 stock on an OMAX abrasive waterjet. The twenty-two body links (black and yellow) were milled on the Shopbot Desktop from high-density polyethylene and Delrin.
The Desktop Shopbot was a perfect tool for the task because its small structural loop produces the precision parts necessary for smooth mechanisms in just a few minutes. Compared to 3D printing, these parts could be produced at lower cost, with greater precision, in one-tenth the time, and with much greater choice of materials. Because of these advantages, Ocelot went several stages of evolution, as small tweaks to the links increased performance. In the end, the robot cost roughly $200 in parts and supplies (mostly electronics), weighed 800 grams, and was fabricated in a single day.

To see high speed video of Ocelot running, check out the link below.
http://www.youtube.com/watch?v=88hqSIMpjtw